Последние конференции
- Информационные системы и модели в научных исследованиях, промышленности, образовании и экологии
- Информационные системы и модели в научных исследованиях, промышленности и экологии
- Современные проблемы экологии
- Экологические проблемы окружающей среды, пути и методы их решения
- Экология, образование и здоровый образ жизни
Применение методов теории систем и искусственного интеллекта в диагностике энергоустановок тепловой электростанции. Оценки риска при использовании нечетких моделей диагностики состояния
Г.Д. Крохин
Новосибирский институт экономики и менеджмента,
г. Новосибирск
Введение
Современная теория принятия решений характеризуется аксиомами, по которым принципом выбора действия является максимизация ожидаемой полезности альтернативы (стратегии, игры). Эта теория учитывает разнообразные свойства реальных задач, связанных с многоцелевым характером, неопределенностью, сложностью получения или же отсутствием или размытостью исходной информации, плохой формализуемостью понятий. Такие свойства особенно характерны проблеме управления надежностью и безопасностью в энергетике. В представляемой ниже части статьи автором рассматривается вариант использования нечетких множеств в модели диагностики состояния при оценивании риска продления эксплуатации энергоустановки в предаварийной ситуации – повышенной температуре колодок упорного подшипника.
Постановка задачи
Рассмотрена проблема неопределенности оценки риска с точки зрения динамики решения данной задачи оптимизации в детерминированной постановке при нескольких альтернативных вариантах модели, [1-5].
Используем модель вида
![]() , (1)
, (1)
для которой технологическая функция (функция характеризующая выполняемые агрегатом задачи)
![]() , (2)
, (2)
с учетом неполноты используемой информации, будет иметь вид
![]() , (3)
, (3)
где ![]() и
и ![]() уже выражены в терминах теории нечетких множеств:
уже выражены в терминах теории нечетких множеств:
![]() (4)
(4)
Здесь, ![]() – отношение сходства;
– отношение сходства; ![]() - средний коэффициент физического и морального износа агрегата;
- средний коэффициент физического и морального износа агрегата; ![]() - общий объем капиталовложений на техническое обслуживание агрегата в течение
- общий объем капиталовложений на техническое обслуживание агрегата в течение ![]() - го межремонтного периода (интервала времени эксплуатации);
- го межремонтного периода (интервала времени эксплуатации); ![]() - дополнительная выработка энергии агрегатом
- дополнительная выработка энергии агрегатом ![]()
![]() при определенных затратах труда
при определенных затратах труда ![]() на восстановление утерянных им функций при износе.
на восстановление утерянных им функций при износе.
1. Реализация оценивания состояния агрегата по его диагностике.
Рассмотрим действия ЛПР при оценивании состояния агрегата по результатам его диагностики. Пусть ЛПР выбирает те значения коэффициентов для модели, которые представляются ему субъективно более предпочтительными. Тогда уравнение состояния представим в виде
![]() , (5)
, (5)
где ![]() и
и ![]() – средние точки интервала, определяемые множеством уровня.
– средние точки интервала, определяемые множеством уровня.
В момент выбора ![]() переменные
переменные ![]() и
и ![]() неизвестны.
неизвестны.
Представим функцию, характеризующую работоспособность агрегата в виде:
![]() , (6)
, (6)
где ![]() ;
; ![]() - весовые коэффициенты.
- весовые коэффициенты.
Эффективность (работоспособность, готовность) агрегата представим как
![]() , (7)
, (7)
где ![]() - функции полезности, которыми выражается количественная мера выработки энергии на каждом из
- функции полезности, которыми выражается количественная мера выработки энергии на каждом из ![]() периодов времени эксплуатации. Введем ограничения вида
периодов времени эксплуатации. Введем ограничения вида ![]() на конечное состояние агрегата. Конечным состоянием считается максимально-предельное состояние агрегата, после которого стоимость капитальных затрат на его восстановление превысит начальную стоимость агрегата
на конечное состояние агрегата. Конечным состоянием считается максимально-предельное состояние агрегата, после которого стоимость капитальных затрат на его восстановление превысит начальную стоимость агрегата ![]() . Здесь выбор величины
. Здесь выбор величины ![]() (некоторого внешнего фактора модели) – имеет субъективный характер.
(некоторого внешнего фактора модели) – имеет субъективный характер.
2. Задание оптимальной траектории гарантии эксплуатации агрегата.
Для обеспечения оптимальной траектории гарантийной эксплуатации агрегата в продолжении всего нормативного срока жизни включим расходы на его восстановление в выражение (7). Решением этой задачи является выбор закона управления, при котором вектор состояния в любой момент времени как можно будет ближе к оптимальному. Номинальный вектор состояния обозначим как ![]() , в предположении, что он будет известным на всем периоде времени жизни агрегата.
, в предположении, что он будет известным на всем периоде времени жизни агрегата.
Задача заключается в выборе таких значений ![]() , которые дают наименьшее значение
, которые дают наименьшее значение ![]() , что, с учетом закона управления вида
, что, с учетом закона управления вида
![]() , (8)
, (8)
можно представить как
![]() . (9)
. (9)
Здесь ![]() удовлетворяет рекуррентным соотношениям
удовлетворяет рекуррентным соотношениям
![]() . (10)
. (10)
Оптимальное управление ![]() будет оптимально только по отношению к выбранному критерию качества, в частности к выбранным весовым коэффициентам
будет оптимально только по отношению к выбранному критерию качества, в частности к выбранным весовым коэффициентам ![]() . Если
. Если ![]() и
и ![]() выбраны с учетом минимизации (максимизации) правой части (10), то получающееся в результате
выбраны с учетом минимизации (максимизации) правой части (10), то получающееся в результате ![]() дает наименьшее (наибольшее) значение
дает наименьшее (наибольшее) значение ![]() , то есть,
, то есть, ![]() . Для любой последовательности
. Для любой последовательности ![]() , существует соответствующее значение
, существует соответствующее значение ![]() , но нет единственного оптимального решения, потому что последнее зависит от того, какие относительные веса будут приписаны
, но нет единственного оптимального решения, потому что последнее зависит от того, какие относительные веса будут приписаны ![]() и
и ![]() . Представим значение
. Представим значение ![]() в виде
в виде
![]() , (11)
, (11)
где ![]() – параметр риска.
– параметр риска.
3. Оценивание риска при реализации оптимальной траектории эксплуатации.
Примем условие ![]() , для которого существует оптимальная последовательность
, для которого существует оптимальная последовательность ![]() , которая минимизирует
, которая минимизирует ![]() . Аппроксимируем используемое нечеткое множество обычным множеством. Пусть
. Аппроксимируем используемое нечеткое множество обычным множеством. Пусть ![]() – множество, а класс нечетких множеств представим в виде
– множество, а класс нечетких множеств представим в виде
![]() (12)
(12)
Введем в ![]() обычную чебышевскую норму:
обычную чебышевскую норму:
![]() (13)
(13)
то есть,
![]() (14)
(14)
Будем считать также истинным выражение
![]() (15)
(15)
Тогда множество ![]() аппроксимирует нечеткое множество
аппроксимирует нечеткое множество ![]() с некоторой точностью
с некоторой точностью ![]() , что можно представить в виде
, что можно представить в виде
![]() , (16)
, (16)
где символ «~» означает нечеткость выбранной точности. Здесь ![]() обозначает характеристическую функцию множества
обозначает характеристическую функцию множества ![]() .Отображение
.Отображение
![]() . (17)
. (17)
Таким образом, можно утверждать, что ![]() имеет смысл. Тогда применим следующий аргумент: «
имеет смысл. Тогда применим следующий аргумент: «![]() – хорошая аппроксимация
– хорошая аппроксимация ![]() », если
», если ![]() мало (или
мало (или ![]() совсем близко к 0). Или это утверждение будет иметь вид:
совсем близко к 0). Или это утверждение будет иметь вид:
![]() . (18)
. (18)
Примем, что рассуждение об аппроксимации соответствует операциям ![]() в решетке
в решетке ![]() . Множество уровня
. Множество уровня ![]() также может аппроксимировать нечеткое множество
также может аппроксимировать нечеткое множество ![]() :
:
![]()
 . (19)
. (19)
В результате получаем значение ![]() , но которое, нельзя назвать хорошей аппроксимацией.
, но которое, нельзя назвать хорошей аппроксимацией.
Пример. «Реализация оценки риска функционирования турбоустановки в предаварийной ситуации».
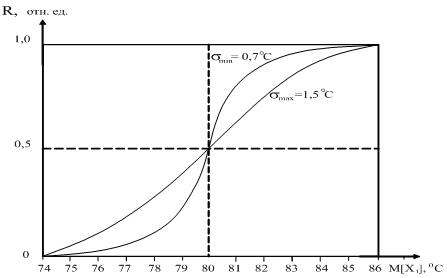
Геометрическое поле функций риска температуры
колодок упорного подшипника турбины Т-100-130 НТЭЦ-4
Здесь, ![]() –математическое ожидание контролируемого эксплуатационного параметра Xi (°С);
–математическое ожидание контролируемого эксплуатационного параметра Xi (°С); ![]() – среднеквадратические (минимальное и максимальное) отклонения эксплуатационных параметров от их математического ожидания;
– среднеквадратические (минимальное и максимальное) отклонения эксплуатационных параметров от их математического ожидания; ![]() – значение функции риска
– значение функции риска ![]() -го агрегата (элемента, узла, энергоустановки), представляющее собой максимальную вероятность выхода значения любого из эксплуатационных параметров за его допустимые пределы изменения
-го агрегата (элемента, узла, энергоустановки), представляющее собой максимальную вероятность выхода значения любого из эксплуатационных параметров за его допустимые пределы изменения ![]() , где
, где ![]() – номер элемента, узла, энергоустановки;
– номер элемента, узла, энергоустановки; ![]() – вероятность выхода за допустимые пределы
– вероятность выхода за допустимые пределы ![]() -го эксплуатационного параметра по агрегату
-го эксплуатационного параметра по агрегату ![]() , т.е. вероятность попадания в интервал
, т.е. вероятность попадания в интервал ![]() .
.
При нормальном законе распределения числовые значения параметров «функция риска» определяются по формуле:
 ,
,
где ![]() – интеграл вероятностей, значения которого табулированы;
– интеграл вероятностей, значения которого табулированы;
 – математическое ожидание измеренных параметров;
– математическое ожидание измеренных параметров;
 – среднеквадратичное отклонение измеренных параметров;
– среднеквадратичное отклонение измеренных параметров; ![]() – значения
– значения ![]() -го контролируемого параметра взятого по
-го контролируемого параметра взятого по ![]() -тому датчику;
-тому датчику; ![]() – число измерительных датчиков, установленных на диагностируемой энергоустановке, агрегате;
– число измерительных датчиков, установленных на диагностируемой энергоустановке, агрегате; ![]() – число контролируемых параметров.
– число контролируемых параметров.
Результаты расчета поля функции рисков![]() по температурным параметрам работы опорно-упорного подшипника турбоагрегата, полученные в предаварийной ситуации, представлены в таблице. Расчеты выполнены согласно рисунку и представленным к нему формулам.
по температурным параметрам работы опорно-упорного подшипника турбоагрегата, полученные в предаварийной ситуации, представлены в таблице. Расчеты выполнены согласно рисунку и представленным к нему формулам.
Опытные значения (0![]() 1) функции рисков
1) функции рисков ![]() , получены при диагностике предаварийной работы упорного подшипника турбины Т-100-130 НТЭЦ-4
, получены при диагностике предаварийной работы упорного подшипника турбины Т-100-130 НТЭЦ-4
|
№ |
Параметр
|
|
|
|
|
|
|
|
|
|
|
о.е. |
|
о.е. | ||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
1. |
Температура рабочих колодок упорного подшипника |
80 |
75 77 79 84 |
0,7 |
0 0,026 0,5 1,0 |
1,5 |
0,0035 0,097 0,5 0,99 |
|
2. |
Температура нерабочих колодок упорного подшипника |
60 |
52 58 61 67,5 |
0,5 |
0 0 0,5 1,7 |
2,5 |
0 0,212 0,5 0,99 |
Список литературы
1. Беллман Р. Принятие решений в расплывчатых условиях. //Вопросы анализа и процедуры принятия решений / Р. Беллман, Л. Заде. - М.: Мир, 1976. – С. 172-215.
2. Системы поддержки принятия решений для исследования и управления энергетикой. /Под ред. А.П. Меренкова, Л.В. Массель. – Новосибирск: Наука СП РАН, 1997. – 162С.
3. Левиатов А.Ю. Принятие решений об оценке качества сложных объектов при нечетких основаниях. // Известия АН СССР. Техническая кибернетика / А.Ю. Левиатов. - 1980, №1. – С.190-195.
4. Фишберн П. Теория полезности для принятия решений / П. Фишберн. - М.: Наука ФМЛ, 1978 – 352С.
5. Хенли Э.Дж. Надежность технических систем и оценка риска / Э.Дж. Хенли, Х. Кумамото. - М.: Машиностроение, 1984. –528 С.