Последние конференции
- Информационные системы и модели в научных исследованиях, промышленности, образовании и экологии
- Информационные системы и модели в научных исследованиях, промышленности и экологии
- Современные проблемы экологии
- Экологические проблемы окружающей среды, пути и методы их решения
- Экология, образование и здоровый образ жизни
Моделирование стартерного режима магнитоэлектрической синхронной машины электроэнергетической установки с газотурбинным двигателем
Н.С. Телешова
Дальневосточный федеральный университет,
г. Владивосток
Одним из основных направлений развития в современном электро- и теплоснабжении является использование автономных электроэнергетических установок на базе высокоскоростных синхронных машин с возбуждением от высококоэрцитивных постоянных магнитов (СМПМ) и газотурбинных двигателей с газовыми подшипниками (ГТД-ГП) [1,2].
Надежность запуска ГТД является одним из факторов, определяющих эксплуатационную надежность энергоустановки в целом, оперативность ее применения, область эксплуатации и, в конечном итоге, технико-экономическую привлекательность для потенциальных заказчиков.
Цель данной работы заключается в проверке возможности частотно-токового управления процессом запуска СМПМ совместно с ГТД от автономного инвертора тока с широтно-импульсной модуляцией с векторным законом управления и поддержкой бездатчикового режима. Реализация такого способа подразумевает наличие в системе управления математических моделей соответствующих идентификаторов регулируемых координат рассматриваемой системы – скорости вращения ротора (![]() ), углового положения ротор (
), углового положения ротор (![]() ), потокосцепления статора (
), потокосцепления статора (![]() ) и электромагнитного момента (
) и электромагнитного момента (![]() ).
).
Изучение поведения СМПМ в режиме стартера, анализ качественных и количественных характеристик энергетических процессов выполняется путем моделирования соответствующей имитационной модели в среде Matlab&Simulink.
Теоретический анализ. Динамику процесса запуска ГТД посредством СДПМ можно представить в виде трех этапов, следующих один за другим [3,4]. В течение каждого этапа на ротор действуют моменты, при которых ротор находиться в состоянии динамического равновесия.
На первом этапе, начинающемся с момента подключения стартера, раскрутка ротора электроэнергетической установки осуществляется только стартером без подачи топлива в камеру сгорания. Конечная частота вращения на этом этапе пуска (![]() ) должна составлять (10…20) % рабочей скорости, продолжительность первого этапа составляет (10…40) с [3,4].
) должна составлять (10…20) % рабочей скорости, продолжительность первого этапа составляет (10…40) с [3,4].
На втором этапе СДПМ и турбина совместно раскручивают ротор ГТД до скорости ![]() , называемой скоростью сопровождения. Скорость
, называемой скоростью сопровождения. Скорость ![]() составляет от 20 до 30 % рабочей скорости ГТД. Продолжительность второго этапа (10…20) с [3,4].
составляет от 20 до 30 % рабочей скорости ГТД. Продолжительность второго этапа (10…20) с [3,4].
При достижении частоты вращения ротора ![]() наступает третий этап запуска. На этом этапе при скорости порядка
наступает третий этап запуска. На этом этапе при скорости порядка ![]() (
(![]() –скорость холостого хода), стартер отключается от источника энергии. Происходит самостоятельный разгон ротора энергоустановки под воздействием лишь избыточного момента, развиваемого турбиной, обеспечивающего выход на режим «малого газа» [3].
–скорость холостого хода), стартер отключается от источника энергии. Происходит самостоятельный разгон ротора энергоустановки под воздействием лишь избыточного момента, развиваемого турбиной, обеспечивающего выход на режим «малого газа» [3].
Полный цикл работы стартера (вплоть до его отключения) составляет от 30 до 120 с, время выхода ГТД на номинальный режим работы и прием нагрузки – от 3 до 5 мин [3,4].
На основании теоретических сведений [5,6] и полученного математического описания СДПМ и идентификаторов регулируемых координат системы на рис. 1 представлена структурная схема имитационной модели двигательного режима работы, используемая при моделировании в среде Matlab&Simulink.
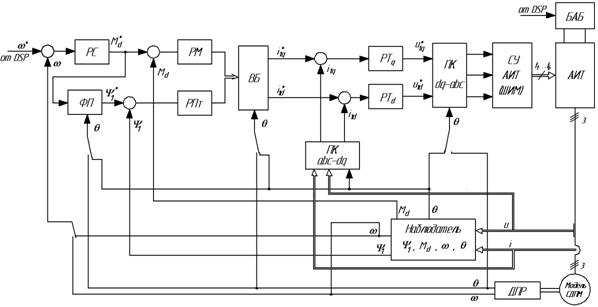
Рис. 1. Структурная схема управления СДПМ:
РС – регулятор скорости; ФП – формирователь потока; РМ – регулятор момента;
РПт –регулятор потокосцепления статора; РТd, РТq –регуляторы тока по осям dq;
ВБ – вычислительный блок; СУ АИТ с ШИМ – система управления автономным инвертором тока с широтно-импульсной модуляцией; f1…f6 – сигналы управления соответствующими вентилями АИТ; БАБ – блок аккумуляторных батарей DSP – цифровой сигнальный процессор; индексом звездочка (*) обозначены сигналы задания
На входах регуляторов тока РТd, РТq сравниваются между собой сигналы задания токов ![]() ,
, ![]() и их значения
и их значения ![]() и
и ![]() , представляющие собой проекции тока обмотки статора СДПМ на оси вращающейся системы координат.
, представляющие собой проекции тока обмотки статора СДПМ на оси вращающейся системы координат.
Принцип формирования трехфазного выходного тока на выходе АИТ с ШИМ в достаточном объеме изложен в литературе [7] и здесь не рассматривается.
Изменение частоты тока на выходе АИТ в процессе запуска СМПМ достигается изменением частоты управляющих сигналов, а изменение амплитуды – изменением их амплитуды.
Для осуществления надежного качественного запуска ГТД посредством СМПМ, предусмотрен блок аккумуляторных батарей (БАБ), управляемый по соответствующему сигналу от DSP.
Структура и параметры соответствующих регуляторов определяются из условий стандартных настроек согласно рекомендациям, изложенным в литературе [7].
Моделирование. На базе структурной схемы векторного управления процессом запуска СДПМ совместно с ГТД (рис. 1) и с учетом оптимизации контуров регулирования на рис. 2 представлена структурная схема имитационной системы «ГТД-СДПМ-АИТ», используемая при моделировании в среде Matlab&Simulink.
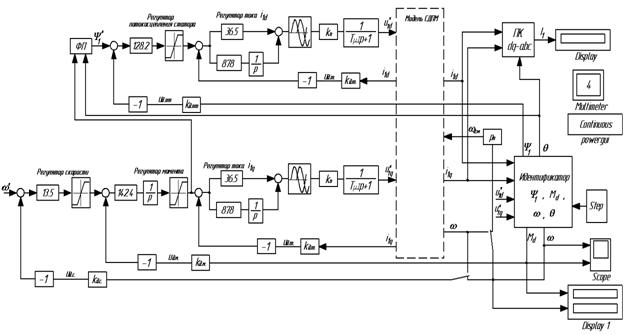
Рис. 2. Имитационная модель системы «ГТД-СДПМ-АИТ»
При моделировании процессов используются данные магнитоэлектрического синхронного генератора 500 кВт с номинальным фазным напряжением 400 В, током якоря 784.3 А, числом полюсов 8, частотой вращения 40 000 об/мин (4.189•103 рад/с), активным сопротивлением 5.851•10-4 Ом, индуктивностями по осям d и q соответственно 8.293•10-6 и 2.28•10-5 Гн, моментом инерции всего агрегата 0.276•10-3 кг•м2; постоянная времени апериодического звена АИН с ШИМ 3.33•10-5с.
Моделирование процесса пуска СДПМ осуществлялось с учетом поэтапного запуска газотурбинного двигателя [3,4].
Процесс был промоделирован в три этапа, заканчивающихся выходом на режим «малого газа». Графики изменения тока и частоты вращения ротора представлены на рис. 3 и, соответственно, на рис. 4.
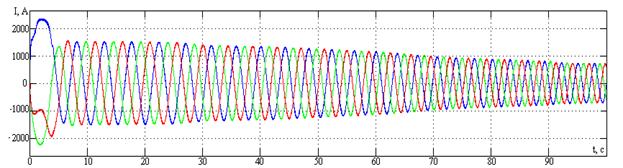
Рис. 3. Результаты моделирования токов обмотки статора
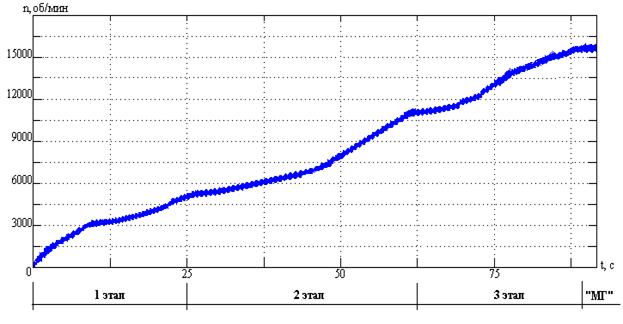
Рис. 4. Результаты моделирования частоты вращения ротора
Из полученных осциллограмм следует, что полный цикл работы стартера составляет 87 с. Продолжительность разгона до пусковой скорости n1≈5 300 об/мин составляет 25 с. Второй этап длительностью порядка 37с заканчивается при достижении скорости вращения n2?11 300 об/мин. При скорости вращения порядка 15 400…16 000 об/мин наступает режим «малого газа». Продолжительность третьего этапа – 15…20 с.
Пуск СДПМ сопровождается колебаниями скорости ротора и, следовательно, угла нагрузки. Исключение колебаний, как известно, уменьшает вероятность выпадение синхронного двигателя из синхронизма при возмущающих воздействиях. Как показали исследования, уменьшить вероятность появления неустойчивых процессов при пуске и при переходе в режим синхронного вращения возможно выбором соответствующих начальных условий.
На основании рекомендаций в [8] и с учетом собственных исследований имитационной модели (рис. 2) для этого достаточно установить поле статора в положение, опережающее ротор на угол:
 , (1)
, (1)
где ![]() – ускорение в эл.рад/с2, создаваемое моментом нагрузки;
– ускорение в эл.рад/с2, создаваемое моментом нагрузки; ![]() – максимальное ускорении, эл.рад/с2.
– максимальное ускорении, эл.рад/с2.
Изменение угла поворота поля статора и его скорости в модели осуществляется посредством использования дополнительного блока Step. Разумеется, в реальных условиях скачкообразное изменение возможно лишь приближенно. Следовательно, реально можно существенно уменьшить колебания, а полностью исключить их можно только в идеализированной модели.
Вывод. Предложенная виртуальная модель позволяет всесторонне исследовать поведение магнитоэлектрической синхронной машины в режиме запуска ГТД, наблюдать и регистрировать значения интересуемых параметров. В дальнейшем предложенная имитационная модель может быть использована в качестве основы для построения расширенной виртуальной модели микротурбинной установки.
Список литературы
1. Румянцев М.Ю., Захарова Н.Е., Поликарпов А.В. Высокоскоростные турбогенераторы для автономных энергетических установок малой мощности с использованием низкопотенциального тепла // Тр. Всерос. науч. тех. конф. ЭНЕРГО-2010, 1-3 июня. – М: Изд.дом МЭИ, 2010. – С. 240-243.
2. Сергеев В.Д., Телешова Н.С. Электроэнергетическая установка с газотурбинным двигателем на газовых подшипниках // Электроавтоматика: Сб. матер. научной конф. Вологдинские чтения. – Владивосток: ДВГТУ, 21-23 ноября 2007. – С. 45-48.
3. Ланчуковский В.И., Козьминых А.В. Автоматизированные системы управления судовых дизельных и газотурбинных установок. Учебние. – М.: Транспорт, 1983.-320с.
4. Обзор и состояние развития современных газотурбинных установок. НТЦ «Микротурбинные технологии». – М.: 2007. - 47с.
5. Телешова Н.С. Моделирование системы «Синхронная машина с постоянными магнитами – двухзвенный преобразователь частоты и напряжения» / Вестник УГАТУ. – Уфа.: УГАТУ, 2009г. – 162-166с.
6. Телешова Н.С. Математическая модель магнитоэлектрической синхронной машины / Науч.-технич. конф. Вологдинские чтения. – Владивосток: ДВГТУ, 2009.
7. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. – М.: Энергоатомиздат, 2006. С. 265.
8. Коршунов А.И. Равноускоренный частотный пуск синхронного двигателя с постоянными магнитами на роторе [Электронный ресурс] // Силовая электроника. – 2007. – №1. – С. 58 – 64. Систем. требования: Adobe Acrobat Reader. URL: www.finestreet.ru (дата обращения: 05.10.11).